иҷҺе—…жіЁпјҡжң¬ж–ҮжҳҜ Google ж— дәәй©ҫ驶项зӣ®жҖ»зӣ‘ Chris Urmson еҸ‘иЎЁеңЁ Medium зҡ„ж–Үз« пјҢз”ұиҷҺе—…зј–иҜ‘гҖӮ
дҪңиҖ…жҢүпјҡ170 дёҮиӢұйҮҢзҡ„иЎҢзЁӢпјҢи®©жҲ‘们дәҶи§ЈдәҶи®ёеӨҡе…ідәҺж— дәәй©ҫ驶系з»ҹзҡ„дәӢжғ…пјҢеҪ“然пјҢиҝҳжңүдәәзұ»жҳҜеҰӮдҪ•ејҖиҪҰзҡ„гҖӮ
зҫҺеӣҪеўғеҶ…жҜҸе№ҙжңү 33000 дәәжӯ»дәҺдәӨйҖҡдәӢж•…пјҢиҝҷе°ұжҳҜдёәд»Җд№Ҳжңүи®ёеӨҡж— дәәй©ҫ驶жұҪиҪҰзҡ„зғӯжғ…ж”ҜжҢҒиҖ…е°ҶзІҫеҠӣдё“жіЁеңЁйҷҚдҪҺдәӢж•…еҸ‘з”ҹзҺҮдёҠйқўгҖӮжҲ‘们и·қзҰ»е®һзҺ°е®Ңе…Ёж— дәәй©ҫ驶жұҪиҪҰзҡ„ж„ҝжҷҜи¶ҠжқҘи¶Ҡиҝ‘пјҢеҸӘйңҖиҰҒдёҖдёӘжҢүй’®ж“ҚдҪңпјҢжңӘжқҘзҡ„ж— дәәй©ҫ驶жұҪиҪҰеҸҜд»Ҙе°Ҷд»»дҪ•дәәд»Һ A зӮ№йҖҒеҲ° B зӮ№пјҢдёҺжӯӨеҗҢж—¶пјҢжҲ‘们д№ҹеңЁжҖқиҖғеҰӮдҪ•иҜ„дј°з ”еҸ‘зҡ„иҝӣеұ•пјҢд»ҘеҸҠеҜ№йҒ“и·Ҝе®үе…Ёзҡ„еҪұе“ҚгҖӮ
дёәдәҶиғҪеӨҹеҲӨж–ӯжұҪиҪҰй©ҫ驶зҡ„е®үе…Ёзі»ж•°пјҢжҲ‘们йңҖиҰҒеј„жё…жҘҡзҡ„жңҖйҮҚиҰҒзҡ„дәӢжғ…д№ӢдёҖе°ұжҳҜе…ёеһӢеҹҺйғҠиЎ—йҒ“жқЎд»¶дёӢзҡ„“еҹәеҮҶ” (baseline) дәӢж•…жғ…еҶөгҖӮз®ҖеҚ•жқҘиҜҙе°ұжҳҜпјҢеӣ дёәи®ёеӨҡдәӢж•…д»ҺжңӘиў«и®Ўе…Ҙе®ҳж–№з»ҹи®ЎпјҢжҲ‘们иҰҒжҗһжё…еңЁйў„жңҹжғ…еҶөдёӢж— дәәй©ҫ驶жұҪиҪҰиў«е…¶д»–жұҪиҪҰж’һеҲ°зҡ„йў‘зҺҮгҖӮз”ҡиҮіжҳҜеҪ“жҲ‘们зҡ„иҪҜ件е’Ңж„ҹеә”еҷЁиғҪеӨҹжҺўжөӢеҲ°еҸҜиғҪеҸ‘з”ҹдәӢ故并еңЁеҜ№ж–№еҸёжңәд№ӢеүҚжӣҙеҝ«йҮҮеҸ–иЎҢеҠЁзҡ„жқЎд»¶дёӢпјҢжңүж—¶еҖҷжҲ‘们д»Қж—§ж— жі•е…ӢжңҚиЎҢ驶йҖҹеәҰе’ҢиҪҰиҫҶи·қзҰ»зҡ„еӣ зҙ пјҢиҖҢжңүж—¶еҖҷжҲ‘们仅仅жҳҜеңЁзӯүеҫ…дәӨйҖҡзҒҜйғҪдјҡиў«ж’һеҲ°гҖӮиҝҷдәӣйғҪжҳҜж— дәәй©ҫ驶жұҪиҪҰеңЁдёҖдәӣзӨҫеҢәиЎҢ驶时зҡ„йҮҚиҰҒеңәжҷҜпјҢе°Ҫз®ЎжҲ‘们еёҢжңӣиғҪеӨҹйҒҝе…ҚжүҖжңүзҡ„дәӢж•…пјҢдҪҶдёҖдәӣдәӢж•…жҳҜж— жі•йҒҝе…Қзҡ„гҖӮ
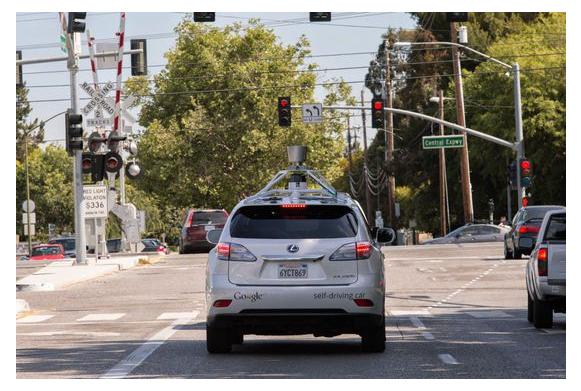
жұҪиҪҰй©ҫ驶дёӯжңҖеёёи§Ғзҡ„дәӨйҖҡдәӢж•…пјҢд№ҹе°ұжҳҜйҖҡеёёзҷҪеӨ©еңЁиЎ—йҒ“иЎҢдҪҝдёӯдјҡйҒҮеҲ°зҡ„——е°Ҹж“Ұзў°пјҢжІЎдәәеҸ—дјӨ——并没жңүиў«еҫҲеҘҪзҡ„еҲҶжһҗпјҢеӣ дёәиҝҷдәӣдәӢ故并дёҚдјҡжұҮжҠҘз»ҷиӯҰеҜҹгҖӮдҪҶжҳҜзҫҺеӣҪй«ҳйҖҹе…¬и·ҜдәӨйҖҡе®үе…Ёз®ЎзҗҶеұҖ (National Highway Traffic Safety Administration) зҡ„ж•°жҚ®жҳҫзӨәпјҢиҝҷдәӣдәӢж•…еҚ е…ЁйғЁиҪҰиҫҶдәӢж•…зҡ„ 55%гҖӮйҷӨйқһдҪ иғҪеӨҹжҜҸеӨ©еқҡжҢҒдёҖиӢұйҮҢдёҖиӢұйҮҢзҡ„й©ҫ驶пјҢеҗҰеҲҷеҫҲйҡҫдәҶи§Ји·ҜйқўдёҠзңҹжӯЈеҸ‘з”ҹдәҶд»Җд№Ҳжғ…еҶөгҖӮиҖҢжҲ‘们зҡ„иҪҰйҳҹдёҖзӣҙе°ұеңЁеҒҡиҝҷ件дәӢпјҢ20 еӨҡиҫҶж— дәәй©ҫ驶жұҪиҪҰе’Ңе®үе…Ёй©ҫ驶е‘ҳеӣўйҳҹпјҢе·Із»ҸзҙҜи®ЎиЎҢ驶дәҶ 170 дёҮиӢұйҮҢ (дәәе·Ҙй©ҫ驶е’Ңж— дәәй©ҫ驶йғҪжңү)гҖӮж— дәәй©ҫ驶жқЎд»¶дёӢзҡ„иЎҢ驶已з»ҸеҚ еҲ°дәҶиҝҷе…¶дёӯзҡ„иҝ‘ 100 дёҮиӢұйҮҢпјҢжҲ‘们зҺ°еңЁжҜҸе‘Ёзҡ„ж— дәәй©ҫ驶平еқҮйҮҢзЁӢж•°з»ҙжҢҒеңЁдёҖдёҮиӢұйҮҢе·ҰеҸі (жҜ”дёҖдёӘе…ёеһӢзҡ„зҫҺеӣҪеҸёжңәдёҖе№ҙзҡ„иЎҢ驶йҮҢзЁӢж•°зЁҚеҫ®е°‘зӮ№)пјҢеӨ§йғЁеҲҶи·ҜеҶөйғҪжҳҜеҹҺеёӮиЎ—йҒ“гҖӮ
дёәдәҶи®©жҲ‘们жүҖжңүдәәйғҪжҲҗдёәжӣҙе®үе…Ёзҡ„й©ҫ驶иҖ…пјҢжҲ‘们еёҢжңӣеҲҶдә«дёҖдәӣи§ӮеҜҹеҲ°зҡ„дәӢж•…жЁЎејҸгҖӮе…¶дёӯеҫҲеӨҡйғҪдёҚжҳҜеҸҰдәәж„ҸеӨ–зҡ„жғ…еҶөпјҢе°Өе…¶жҳҜиҖғиҷ‘еҲ°жҲ‘们йғҪзҹҘйҒ“еҸёжңәж“ҚдҪңеӨұиҜҜеҜјиҮҙ 94% зҡ„дәӨйҖҡдәӢж•…иҝҷдёҖзӮ№гҖӮ
еҰӮжһңдҪ еңЁйҒ“и·ҜдёҠиЎҢ驶足еӨҹеӨҡж—¶й—ҙзҡ„иҜқпјҢдәӢж•…ж— и®әеҰӮдҪ•йғҪдјҡеҸ‘з”ҹпјҢж— и®әдҪ жҳҜеңЁжҷ®йҖҡжұҪиҪҰиҝҳжҳҜж— дәәй©ҫ驶жұҪиҪҰеҪ“дёӯгҖӮиҮӘд»Һ Google ж— дәәй©ҫ驶项зӣ®ејҖе§Ӣиө·зҡ„иҝҮеҺ»е…ӯе№ҙйҮҢпјҢжҲ‘们еңЁй•ҝиҫҫ 170 дёҮиӢұйҮҢзҡ„ж— дәәй©ҫ驶е’Ңдәәе·Ҙй©ҫ驶дёӯпјҢжҖ»е…ұеҮәдәҶ 11 иө·е°ҸдәӢж•… (е°Ҹж“Ұзў°пјҢж— дәәеҸ—дјӨ)пјҢеңЁиҝҷиҝҮзЁӢдёӯжҲ‘们еӣўйҳҹзҡ„е®үе…Ёй©ҫ驶е‘ҳе§Ӣз»ҲеңЁж–№еҗ‘зӣҳеҗҺйқўпјҢдё”жІЎжңүдёҖж¬ЎжҳҜиҮӘеҠЁй©ҫ驶еҠҹиғҪеҜјиҮҙдәӢж•…зҡ„еҸ‘з”ҹгҖӮ
иҝҪе°ҫ (rear-end crashes) жҳҜзҫҺеӣҪеҸ‘з”ҹжңҖйў‘з№Ғзҡ„дәӨйҖҡдәӢж•…пјҢз»ҸеёёжҳҜеүҚиҪҰеҸёжңәжІЎжңүд»»дҪ•еҠһжі•йҒҝе…Қиў«ж’һжғ…еҶөзҡ„еҸ‘з”ҹпјӣжҲ‘们被其他иҪҰд»ҺеҗҺйқўж’һдәҶдёғж¬ЎпјҢдё»иҰҒжҳҜеңЁзӯүдәӨйҖҡзҒҜзҡ„ж—¶еҖҷпјҢд№ҹжңүеңЁе°Ғй—ӯе…¬и·ҜжӯЈеёёиЎҢ驶зҡ„ж—¶еҖҷгҖӮжҲ‘们д№ҹйҒҮеҲ°дәҶеҮ ж¬Ўдҫ§йқўж“Ұзў° (side-swiped) зҡ„жғ…еҶөпјҢиҝҳжңүдёҖж¬Ўиў«й—ҜзәўзҒҜзҡ„иҪҰж’һеҲ°гҖӮжӯЈеҰӮдҪ еҸҜиғҪйў„ж–ҷеҲ°зҡ„пјҢжҲ‘们еңЁиЎ—йҒ“и·ҜеҶөдёӢзҡ„жҜҸиӢұйҮҢдәӢж•…ж•°иҰҒй«ҳдәҺе°Ғй—ӯе…¬и·Ҝзҡ„и·ҜеҶөгҖӮжҲ‘们еңЁи·ҜйқўдёҠзҡ„жүҖжңүз–ҜзӢӮз»ҸеҺҶеҜ№дәҺж— дәәй©ҫй©¶з ”з©¶йЎ№зӣ®йғҪйқһеёёжңүд»·еҖјгҖӮжҲ‘们жңүдёҖдёӘиҜҰз»Ҷзҡ„иҜ„дј°жөҒзЁӢпјҢ并е°ҪеҠӣд»ҺжҜҸдёҖж¬ЎдәӢж•…дёӯиҺ·еҸ–дёҖдәӣдёңиҘҝпјҢеҚідҪҝдәӢж•…зҡ„еҸ‘з”ҹ并йқһз”ұжҲ‘们зҡ„иҝҮй”ҷеҜјиҮҙгҖӮ
жҲ‘们дёҚд»…еңЁдәҶи§ЈеҹҺйғҠиЎ—йҒ“е°ҸдәӢж•…еҸ‘з”ҹзҺҮзҡ„й—®йўҳпјҢеҗҢж ·еңЁеҲӨж–ӯй©ҫ驶е‘ҳж“ҚдҪңзҡ„жЁЎејҸпјҢжҜ”еҰӮеҒҸйҒ“ (lane-drifting) е’Ңй—ҜзәўзҒҜ (red-light running) иҝҷдәӣеҜјиҮҙйҮҚеӨ§дәӢж•…зҡ„дё»иҰҒеҺҹеӣ гҖӮиҝҷдәӣж“ҚдҪңд№ жғҜз”ҡиҮідёҚдјҡеңЁе®ҳж–№з»ҹи®ЎдёӯеҮәзҺ°пјҢдҪҶжҳҜеҚҙз»ҷжүҖжңүдәәеҲ¶йҖ дәҶдёҖдёӘеҚұйҷ©зҡ„еұҖйқўгҖӮ
зӣ®еүҚйҒ“и·Ҝй©ҫ驶дёӯзҡ„й—®йўҳ
и®ёеӨҡдәә并дёҚжіЁж„Ҹи·Ҝйқўжғ…еҶөгҖӮеңЁзҫҺеӣҪд»»дҪ•дёҖдёӘзҷҪеӨ©зҡ„ж—¶еҲ»пјҢе°ұжңү 66 дёҮеқҗеңЁж–№еҗ‘зӣҳеҗҺзҡ„дәәеңЁжҹҘзңӢ他们зҡ„移еҠЁи®ҫеӨҮпјҢиҖҢдёҚжҳҜжіЁж„Ҹи·Ҝйқўзҡ„жғ…еҶөгҖӮжҲ‘们зҡ„е®үе…Ёй©ҫ驶е‘ҳз»ҸеёёдјҡзңӢеҲ°е…¶д»–иҪҰеңЁиҪҰйҒ“дёҠжҷғжқҘжҷғеҺ»пјӣжҲ‘们иҝҳи§ҒеҲ°иҝҮдёҖиҫ№ејҖиҪҰдёҖиҫ№зңӢд№Ұзҡ„дәәпјҢз”ҡиҮіиҝҳжңүеҗ№е°Ҹе–ҮеҸӯзҡ„жғ…еҶөгҖӮж— дәәй©ҫ驶жұҪиҪҰеңЁиҝҷдёҖзӮ№дёҠж— з–‘иҰҒжҜ”дәәзұ»жӣҙе®үе…ЁгҖӮеүҚиҖ…жӢҘжңү 360 еәҰи§ҶйҮҺеӨ–еҠ 100пј… зҡ„е…Ёж—¶е…Ёж–№еҗ‘жҺўжөӢпјӣжҲ‘们жңҖж–°зҡ„дј ж„ҹеҷЁиғҪеӨҹиҝҪиёӘе…¶д»–жұҪиҪҰгҖҒиҮӘиЎҢиҪҰе’ҢиЎҢдәәпјҢиҢғеӣҙиҝңиҮідёӨдёӘи¶ізҗғеңәзҡ„и·қзҰ»гҖӮ
дәӨйҒ“и·ҜеҸЈдјҡжҳҜеҫҲжҒҗжҖ–зҡ„ең°ж®өгҖӮеңЁиҝҮеҺ»еҮ е№ҙйҮҢпјҢзҫҺеӣҪйҒ“и·ҜзҺҜеўғдёӯ 21% зҡ„жӯ»дјӨдәӢж•…е’Ң 50пј… зҡ„йҮҚдјӨдәӢж•…йғҪдёҺдәӨйҒ“и·ҜеҸЈжңүе…ігҖӮеҸ—дјӨзҡ„йҖҡеёёжҳҜиЎҢдәәе’Ңиў«ж’һиҪҰиҫҶзҡ„еҸёжңәпјҢиҖҢдёҚжҳҜй—ҜзәўзҒҜзҡ„иӮҮдәӢеҸёжңәгҖӮиҝҷд№ҹжҳҜдёәд»Җд№ҲжҲ‘们е°ҶиҪҰиҫҶи®ҫзҪ®дёәеңЁдәӨйҖҡзҒҜеҸҳз»ҝд№ӢеҗҺе…ҲдҝқжҢҒдёҖж®өй©»иҪҰзҠ¶жҖҒпјҢд№ӢеҗҺеҶҚ驶иҝҮи·ҜеҸЈзҡ„еҺҹеӣ ——йҖҡеёёиҝҷдёӘж—¶еҖҷжңүдәӣеҸёжңәдјҡжҲ–дёҚиҖҗзғҰжҲ–дёҚдё“еҝғең°еҠ йҖҹ驶е…Ҙи·ҜеҸЈгҖӮ
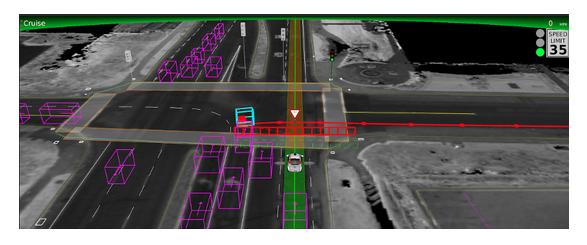
еңЁиҝҷдёӘжЎҲдҫӢеҪ“дёӯпјҢдёҖиҫҶиҮӘиЎҢиҪҰ (жө…и“қиүІж–№еқ—ж ҮжіЁ) еңЁйҖҡиҝҮйҒ“и·ҜдәӨеҸЈзҡ„ж—¶еҖҷиҫғжҷҡпјҢе·®дёҖзӮ№иў«еҗ‘е·ҰиҪ¬еҗ‘зҡ„дёҖиҫҶжұҪиҪҰ (иҝӣе…Ҙи·ҜеҸЈзҡ„зҙ«иүІж–№еқ—ж ҮжіЁ) ж’һеҲ°пјҢеҗҺиҖ…并没жңүжіЁж„ҸеҲ°иҮӘиЎҢиҪҰпјҢ并еңЁдәӨйҖҡзҒҜеҸҳз»ҝеҗҺеҗҜеҠЁиЎҢ驶гҖӮжҲ‘们зҡ„ж— дәәй©ҫ驶жұҪиҪҰйў„еҲӨеҲ°дәҶиҮӘиЎҢиҪҰзҡ„ж“ҚдҪң (зәўиүІи·Ҝзәҝж ҮжіЁ)пјҢ并没жңүз«ӢеҲ»иЎҢ驶пјҢиҖҢжҳҜзӣҙеҲ°иҮӘиЎҢиҪҰе®ү全驶иҝҮи·ҜеҸЈеҗҺжүҚеҗҜеҠЁгҖӮ
иҪ¬ејҜеҸҜиғҪдјҡеёҰжқҘйә»зғҰгҖӮжҲ‘们и§ӮеҜҹеҲ°еҫҲеӨҡеҸёжңәиҪ¬ејҜд№ӢеҗҺ继з»ӯиЎҢ驶еңЁй”ҷиҜҜиҪҰйҒ“дёҠзҡ„жғ…еҶөпјҢе°Өе…¶жҳҜеңЁеӨңй—ҙпјҢеҸёжңәеңЁйҒ“и·Ҝдёӯй”ҷзәҝиЎҢ驶 (overshoot or undershoot the median) зҡ„жғ…еҶөеҫҲжҷ®йҒҚгҖӮ

еңЁиҝҷеј еӣҫдёӯдҪ еҸҜд»ҘзңӢеҲ°пјҢдёҚд»…жҳҜдёҖиҫҶпјҢиҖҢжҳҜдёӨиҫҶжұҪиҪҰ (еңЁз»ҝиүІи·Ҝзәҝе·Ұдҫ§зҡ„дёӨдёӘзҙ«иүІж–№еқ—пјҢжӯЈжҳҜдҪ еңЁеӣҫзүҮдёҠзңӢеҲ°зҡ„жұҪиҪҰ) жӯЈеңЁй”ҷиҜҜзҡ„иҪҰйҒ“дёҠеҗ‘жҲ‘们驶жқҘпјӣиҝҷдёӘжғ…еҶөеҸ‘з”ҹеңЁеұұжҷҜеҹҺеӨңжҷҡ (Mountain View) жңҖз№Ғеҝҷзҡ„дёҖжқЎйҒ“и·ҜдёҠгҖӮ
жңүж—¶еҖҷпјҢеҸёжңәеңЁж„ҸиҜҶеҲ°д»–们е°Ҷдјҡй”ҷиҝҮиҪ¬ејҜи·ҜеҸЈзҡ„ж—¶еҖҷпјҢдјҡеҒҡйқһеёёж„ҡи ўзҡ„дәӢжғ…гҖӮ

дёҖиҫҶжұҪиҪҰ (еҺӢеңЁз»ҝиүІжқЎзҠ¶и·ҜзәҝдёҠзҡ„зҙ«иүІж–№еқ—пјҢдёҠйқўжңүдёҖдёӘеҸ№еҸ·ж ҮжіЁ) еҶіе®ҡд»ҺжҲ‘们е·Ұдҫ§зҡ„иҪҰйҒ“еҗ‘еҸіиҪ¬пјҢзӣҙжҺҘз©ҝиҝҮжҲ‘们зҡ„и·ҜзәҝгҖӮз»ҝиүІзҡ„жқЎзҠ¶и·ҜзәҝпјҢжҲ‘们称д№Ӣдёә“зҜұз¬Ҷ”(fence)пјҢжҳҫзӨәжҲ‘们зҡ„жұҪиҪҰдјҡеҮҸйҖҹпјҢйҒҝе…ҚдёҺиҝҷиҫҶз–ҜзӢӮиҪ¬еҗ‘зҡ„жұҪиҪҰзӣёж’һгҖӮ
жңүдәӣж—¶еҖҷпјҢдёҖдәӣеҸёжңәејҖиө·иҪҰжқҘе°ұеҘҪеғҸжҲ‘们没еңЁйӮЈйҮҢдёҖж ·гҖӮеңЁдёӢйқўдёҖе№…еӣҫдёӯпјҢе·Ұдҫ§зҡ„дёҖиҫҶиҪҰ (з©ҝиҝҮзәўиүІ“зҜұз¬Ҷ”зҡ„зҙ«иүІж–№еқ—ж ҮжіЁ) зӘҒ然еҶІеҗ‘жҲ‘们зҡ„иҪҰйҒ“гҖӮеңЁиҝҷдёӘдҫӢеӯҗеҪ“дёӯпјҢзәўиүІ“зҜұз¬Ҷ”жҳҫзӨәзҡ„жҳҜжҲ‘们зҡ„жұҪиҪҰеҒңжӯўе№¶еҒҡеҮәйҒҝи®©гҖӮ

иҝҷдәӣй©ҫ驶з»ҸеҺҶ (иҝҳжңүж•°дёҚжё…зҡ„е…¶д»–дҫӢеӯҗ) и®©жҲ‘们жӣҙж·ұең°и®ӨиҜҶеҲ°дәҶеҪ“дёӢйҒ“и·Ҝй©ҫ驶йқўдёҙзҡ„й—®йўҳжҢ‘жҲҳгҖӮжҲ‘们дјҡ继з»ӯиЎҢ驶数еҚғиӢұйҮҢпјҢиҝҷж ·жҲ‘们е°ұиғҪжӣҙеҘҪең°дәҶи§Јй—®йўҳпјҢйӮЈдәӣеёёи§Ғзҡ„еҜјиҮҙи®ёеӨҡж—ҘеёёиЎҢ驶дәӢж•…зҡ„ж“ҚдҪңзҺ°иұЎ——жҲ‘们д№ҹдјҡ继з»ӯеҠӘеҠӣејҖеҸ‘иҮӘеҠЁй©ҫ驶жұҪиҪҰпјҢи®©еҗҺиҖ…дёәдәәзұ»и§ЈеҶіиҝҷдёӘй—®йўҳжҢ‘жҲҳгҖӮ
жң¬ж–ҮжқҘжәҗпјҡиҷҺе—…зҪ‘




